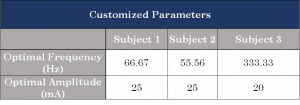
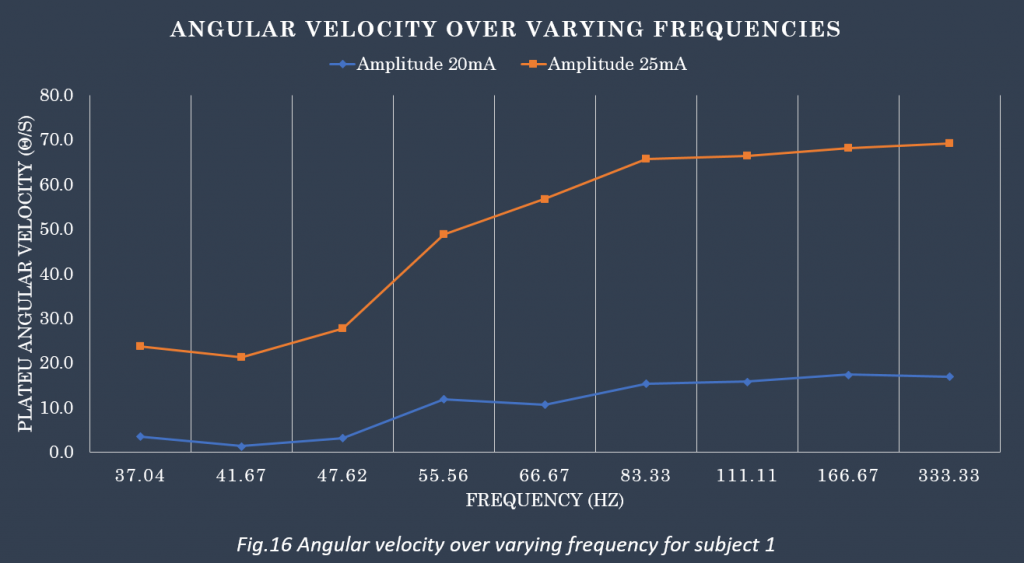
Our next set of trials, 3 subjects performed these trials. This test we changed the frequency of stimulation by modifying the period parameter of the stimulator. Since, frequency = 1/period. We started from a period of 27 ms (a frequency of 37.04 Hz) and decremented by 3 ms until we reached a period of 3 ms (a frequency of 333.33 Hz). We kept the amplitude constant, a set of trials with 20 mA and a set with 25 mA.
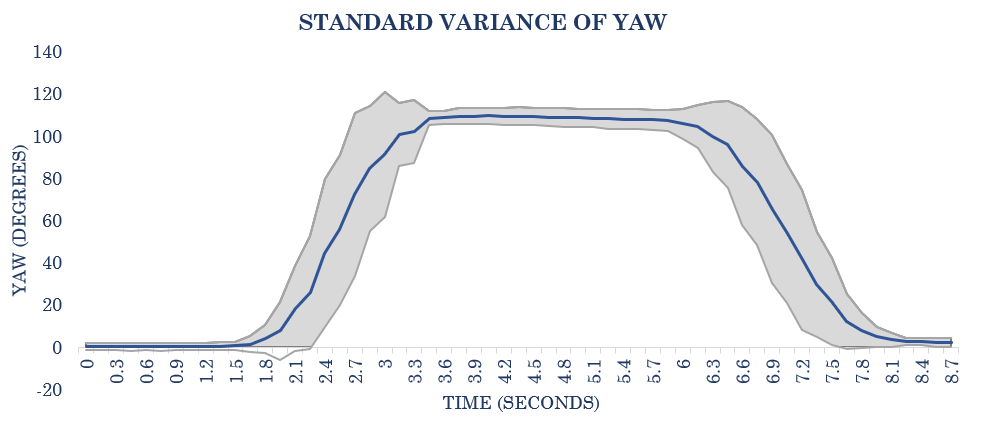
Using this data, we analyzed the angular velocity of the yaw angle during the plateau of the ramp. The graph below has data from subject 1. As the amplitudes increase and the frequencies increase, the arm starts to move faster. Comparing the different amplitudes of the curves, it’s seen for the 20 mA, the velocity is lower than the velocity of the 25 mA. And the curves, gradually increase as the frequency increases as well.

 Comments(0)
Comments(0)